|
抓斗起重机四绳抓斗差动控制系统
王健明
2005-4-16 返回论文 四绳抓斗作为搬运散料的吊具,可配用于不同的抓斗起重机。但由于要求的生产率不同,抓斗起重机的起升速度不同,因此四绳抓斗的控制系统也不一样。例如港口卸船用的抓斗卸船机要求的生产率为每小时500t,
因此起升速度大于75m/min,多采用直流电动机驱动和PC控制。对工业生产中量大面广的诸如水泥、煤炭和矿砂等散料搬运场合,其生产率不很高,一般起升速度小于75m/min,以采用交流电动机驱动为宜。
1.
原控制系统的缺点:
用交流电动机驱动的四绳抓斗传动系统(图1),有以下主要缺点:
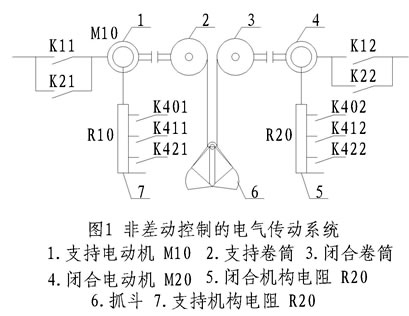
1.
抓斗工作的协调主要靠司机的熟练程度,由于支持与闭合机构之间没有固定的联
系,在抓斗工作时司机劳动强度大,容易疲劳,易产生误操作。
2.
在抓斗沉抓之后,起升的瞬间,司机稍有疏忽会造成闭合电动机单独受力,闭合电
动机容易过载,甚至烧毁。
3.抓斗上升和下降极限位置不易控制,下降时抓斗易与料堆强烈碰撞。
4.抓斗穿钢丝绳时,司机和钳工协调困难,极易出现工伤事故。
5.由于开斗下降速度快,抓斗停止料堆上时,闭合绳容易从滑轮组中跳出,致使闭合绳过早的报废。
6.为实现合适的抓斗工况,司机经常点动操作或打回车,电器元件或电动机经常处于过渡过程,降低了元件的使用寿命。
2.
差动控制及其效益
四绳抓斗采用差动开关控制之后,可将支持机构和闭合机构的信号联系起来,能用单手柄联动台进行联动控制,实现工作半自动化。该差动控制系统于1992年6月由大连市科委组织通过了鉴定,鉴定意见如下:
(1)四绳抓斗差动控制系统系我国抓斗起重机电控系统中的新开发系统,技术成熟,功能完善,具有“自动沉抓”提高生产率,抓满后能自动起升。操作简便,司机劳动强度低,提升和开闭两电动机负载均衡,可避免开闭电动机的过载烧毁,延长开闭钢丝绳寿命,对抓斗实现有效的保护,避免抓斗摔坏。此外还增加了更换钢丝绳的操作装置,便于维修。经工业运行证明有显著的经济效益和社会效益。
(2)该控制系统填补了国内空白,能替代进口,在继电―接触器控制系统中,具有当代国际同类系统产品的先进水平。
该系统虽然成本有所增加,但其社会效益显著提高,除可明显减轻司机的劳动强度外,每台起重机(以本溪水泥厂10t抓斗起重机为例)平均每年可为用户节约更换电动机和钢丝绳等费用2.5万元以上。可见,差动开关控制系统的推广与应用前景是十分乐观的。
3.
差动开关的控制原理
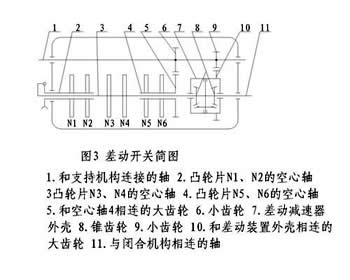
差动控制系统的框图见图2,差动开关的结构简图见图3。

(1) 机械部分
①支持机构
在支持轴上有齿轮6和齿轮9(图3),齿轮6和齿轮5相啮合,带动空心轴4旋转,速比为4:1。
②闭合机构
闭合轴11通过差动机构带动轴3以及空心轴2(图3)。当支持机构和闭合机构专塑像同时,差动减速器输出轴3转速为零。当闭合机构单独工作时,轴3只能转动3/4圈。
(2) 电气部分
①和支持机构有关的凸轮片N5、N6,其相应控制的触点为b2和b1(见图4)。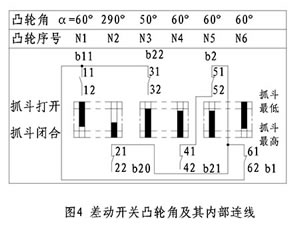
b2控制下极限位置,b1控制下极限位置。
②和闭合机构有关的凸轮片有N1、N2、N3和N4。N1凸轮片控制触点b11,其作用是党抓斗完全闭合式打开;N2凸轮片控制触点b20,其作用是当抓斗要闭合时触点闭合,控制支持绳和自动起升;N3凸轮片控制触点b22,其作用是当抓斗慢速开斗下降时,防止闭合绳跳槽;
N4凸轮片控制触点b21,其作用是当抓斗完全打开时触点打开。
图4为差动开关凸轮片及其内部连线,途中所示是抓斗闭合并在最高位置时差动开关的工作状态。差动开关支持轴和闭合轴转速相同时,差动装置输出为零。由于差动开关按行程原则进行工作,支持机构和闭合机构的制动器应调整得一致,制动弹簧的拉力调整到额定值的90%左右。如果制动器抱闸太松,差动开关触头的工作点改变,会使工作失调。
4.
抓斗各工况的控制
采用差动开关后,由于增加了转子回路电阻,使电动机可以工作在正、反向电动状态和反接制动状态,利用附加电阻可以调整支持绳在沉抓时不致太松,闭合绳在开斗下降时保持抓斗处于张开状态。
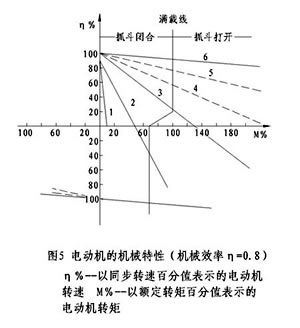
电动机的机械特性见图5,对联动台的手柄位置,相应电动机工作状态以及转子回路电阻器的切换,分析如下。图11
单手柄联动台手柄位置
⑴抓斗开斗工作状况
闭合电动机处于反向电动状态,使抓斗张开,三相转子电阻中的u4、v4、w4以下各段被短接。当抓斗张开到极限位置时,差动开关b21触点被打开,控制电路断电,自动停止。.联动台手柄应放到抓斗张开位置。此时支持电动机不工作,见图6b。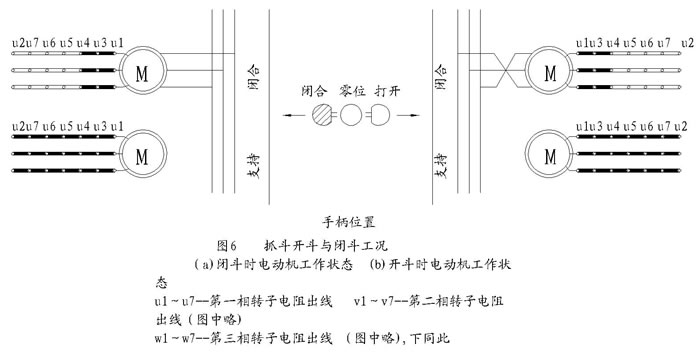
⑵ 抓斗闭合工作状况
闭合电动机处于正向电动状态,转子电阻u4、v4和w4以下各段均短接。当抓斗闭合到极限位置时,差动开关b11触点被打开,闭合电路断电,闭斗工作自动停止。支持电动机此时不工作。手柄应放到抓斗闭合位置,见图6a。
⑶
抓斗开斗慢速下降
闭合电动机已处于开斗极限位置,但由于是在下降运行,当支持机构和闭合机构速度不一致时,抓斗会有闭合的趋势,离开极限位置。为保证抓斗打开,b21又重新闭合,使电动机处于反向电动状态,故用虚线表示定子接线(图7b),直到抓斗又重新开到极限位置,b21打开,自动停止。在慢速下降时,这种动作可能要重复几次。
支持机构电动机处于反接制动状态,转子回路中将附加电阻短接,即u7、v7、w7以下电阻短接。下降速度为额定速度的20%~30%。手柄放到开斗慢速下降第一挡。
⑷
闭斗慢速下降
闭合电动机和支持电动机均处于反接制动状态。这样可以保证抓斗处于闭合状态,而支持电动机处于反接制动时,又可获得低速。此时手柄应放到闭斗慢速下降第一挡,见图7a。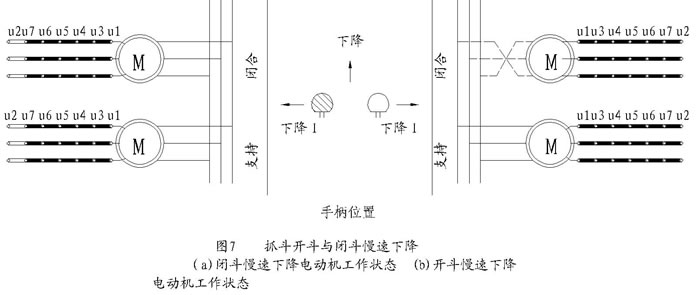
⑸ 开斗快速下降
闭合电动机和支持电动机处于再生发电制动状态,两个机构同时运行。转子回路除软化电阻之外,u3、v3、w3以下各段电阻均短接。手柄应放置在开斗下降快速挡上,见图8b。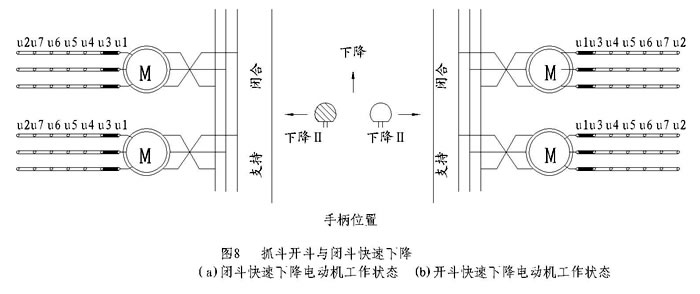
⑹ 闭斗快速下降
闭合电动机和支持电动机均处于再生发电制动状态,转子回路除软化电阻之外,u3、v3和w3以下各段电阻均被短接。手柄应放置在闭斗快速下降挡上,见图8a。
⑺
开斗慢速上升
闭合电动机为保证抓斗处于开斗状态,应将转子电阻全部串入,对抓斗的开闭不产生影响,只跟随支持电动机上升。
支持电动机为正向电动状态,转子回路反向制动电阻即u6、v6和w6以下短接,见图9b。
⑻ 闭斗慢速上升
支持机构和闭合机构电动机均工作在正向电动状态,转子回路电阻u6、v6和w6以下各段均短接,即把反接电阻和附加电阻短接。起升速度大约为额定速度的20%~30%,见图9a。
⑼
开斗快速上升
支持机构和闭合机构电动机均工作在正向电动状态,转子回路除软化电阻之外,其余全部短接,见图10b。
⑽ 闭斗快速上升
闭合机构和支持机构电动机均工作在正向电动状态,转子回路除软化电阻之外全部短接,见图10a。
⑾
抓斗沉抓和自动起升
当抓斗抓取物料时,为了提高抓满率,必须使支持绳随抓斗抓取物料下降,同时又要抓斗闭斗后起升时支持绳受力。解决的办法是使支持电动机处于深度的反接制动状态,使钢丝绳自重对卷筒的力矩和电动机上升力矩相平衡,实际上要梢大于电动机的力矩。为获得这种状态,支持电动机转子回路应串有大阻值电阻,即把附加电阻串入,使电动机的特性变得相当软,如图5电动机的机械特性曲线中的第1条曲线。
为了更好地理解沉抓和自动起升,应先了解闭斗慢速起升和快速起升的机理。闭斗慢速上升的操作有两种可能的状态,一是打开的抓斗在起升高度的任何位置(极限位置除外),主令控制器的操纵杆由零位经过闭合放到起升第1挡上。此时闭合电动机定子正向接触器接通,转子回路立即将附加电阻和反接电阻切除,开始加速。经过二级延时控制,切除加速电阻,抓斗即将闭合。此时差动开关b20触点闭合,切断后二级转子加速接触器的控制电源,使转子仍保持附加电阻和反接电阻外的全部加速电阻。而支持电动机正向接触器接通,转子回路在抓斗闭合期间串入全部电阻,使支持电动机处于深度反接制动状态。当抓斗闭合时,支持绳自重使支持电动机往下降方向缓慢转动,在抓斗闭合前受b20触点的控制,使附加电阻和反接电阻切除。闭合电动机、支持电动机均处于正向电动状态,转速约为额定速度的20%~30%。二是如果抓斗开斗放在料堆上,操纵手柄放到闭斗起升第1挡,工作程序和上述一样。由于支持电动机转子回路串有全部电阻,能够实现沉抓,但抓斗闭合力不够,抓斗可能不完全闭合,b20触点因此也可能不闭合,所以抓斗就停在料堆上。闭斗慢速起升电动机工作状态见图9a。手柄打到闭斗快速上升挡,由于主令控制器使加速继电器吸合,将b20触点切断的控制电源接通,使闭合机构和支持机构转子回路除常串电阻外,全部短接。于是无论是闭合机构电动机或是支持机构电动机均处于正向电动状态,转速接近额定转速。电动机工作状态见图10a。
沉抓和自动起升是上述两种工况(慢速上升和快速上升)的连续执行,因此要求抓斗开斗放在料堆上实现沉抓与自动上升,必须使主令控制器的操纵杆从零位经闭斗放到起升第2挡上。此外,b20处点的调整也是非常重要的。如果抓斗未进入闭合状态,b20闭合过早,会是抓斗在为闭合情况下起升。如果抓斗已闭合,b20闭合过晚,会使闭合的抓斗处于上升等待状态,容易使支持绳突然受力,甚至抻断。经过正确调整差动开关b20触点的工作位置,使主斗闭合后随即起升,四根绳受力均匀,工作柔和协调。
为了防止开斗快速下降和物料撞击,应在接近物料前,将主令控制器手柄放到下降慢速挡,当慢速接近料堆时,如果抓斗继续下降,闭合绳将松弛,b22触点断开,是闭合机构制动器断电,防止闭合绳从滑轮组中跳出。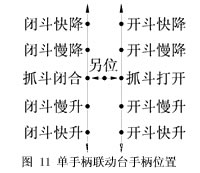
配合差动开关,两个机构的主令控制器用一个守彬操作,手柄运动轨迹为H型(见图11),具有工作挡位清楚,不需要点动,操作力小,在固定导槽中运动可防止误操作等优点。此外还设有一个手动控制按钮盒,供抓斗穿钢丝绳使用,非常方便。
综上所述,四绳抓斗采用差动控制根除了起升瞬间支持绳不出力的缺陷,避免烧毁闭合电动机,而又操作简便,实现了半自动控制,可提高生产率,增加社会效益与经济效益。

|